
can_bus.cpp File Reference
#include "rm_hw/hardware_interface/can_bus.h"#include <string>#include <ros/ros.h>#include <rm_common/math_utilities.h>
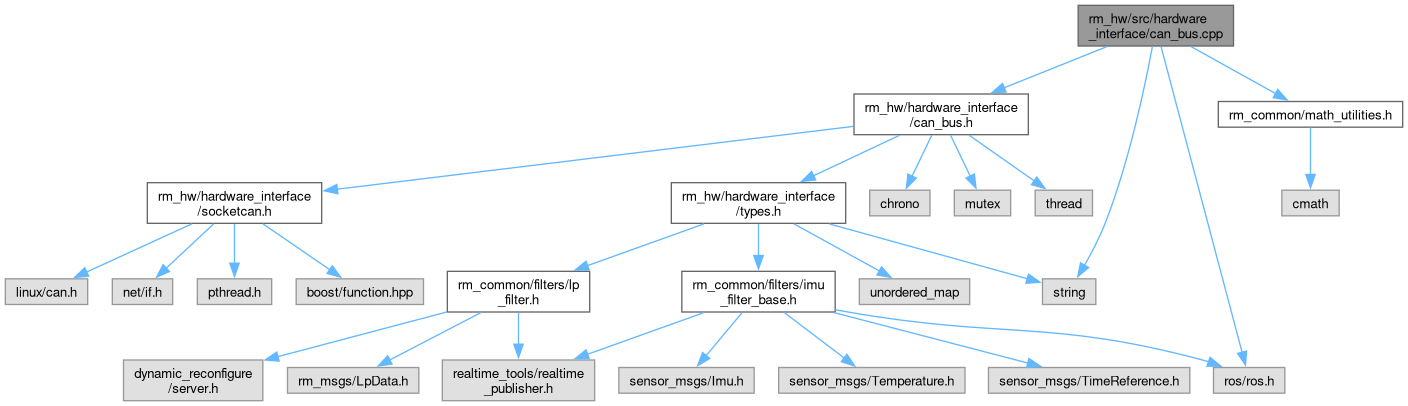
Include dependency graph for can_bus.cpp:
Namespaces | |
| namespace | rm_hw |
Generated by
|
rm_control
|
#include "rm_hw/hardware_interface/can_bus.h"#include <string>#include <ros/ros.h>#include <rm_common/math_utilities.h>Namespaces | |
| namespace | rm_hw |